Smart Oil Gauge

Overview
Product Page: https://www.smartoilgauge.com/shop/product/ccf901i/ SKU: CCF-901
Pinout
| Pin | Function |
|---|---|
| GPIO14 | Ultrasonic Power |
| GPIO12 | Control Button (HIGH = off, LOW = on) |
| GPIO13 | System Timer DONE (TP5111) |
| GPIO15 | Analog Switch SELECT (SN74LVC1G3157) |
| GPIO2 | Control Board LED (HIGH = off, LOW = on) |
| GPIO0 | UART download |
| GPIO16 | Connected to RST |
| A0 | Temperature or Battery Voltage |
| RST | Reset, Connected to GPIO16 |
| GPIO5 | Ultrasonic Echo (JSN-SR04T) |
| TXD | UART0_TXD |
| RXD | UART0_RXD |
| GPIO4 | Ultrasonic Trigger (JSN-SR04T) |
Flashing
- REMOVE THE BATTERIES!!
- Remove the control board
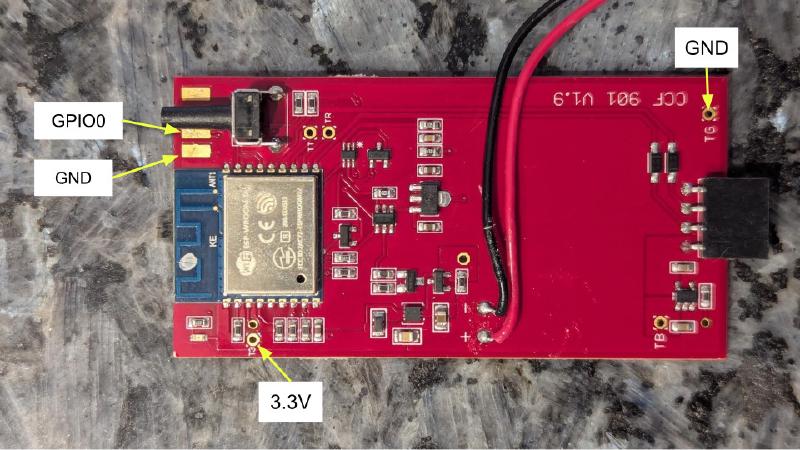
- Locate the contact points required for Physically Connecting to your Device:

 \
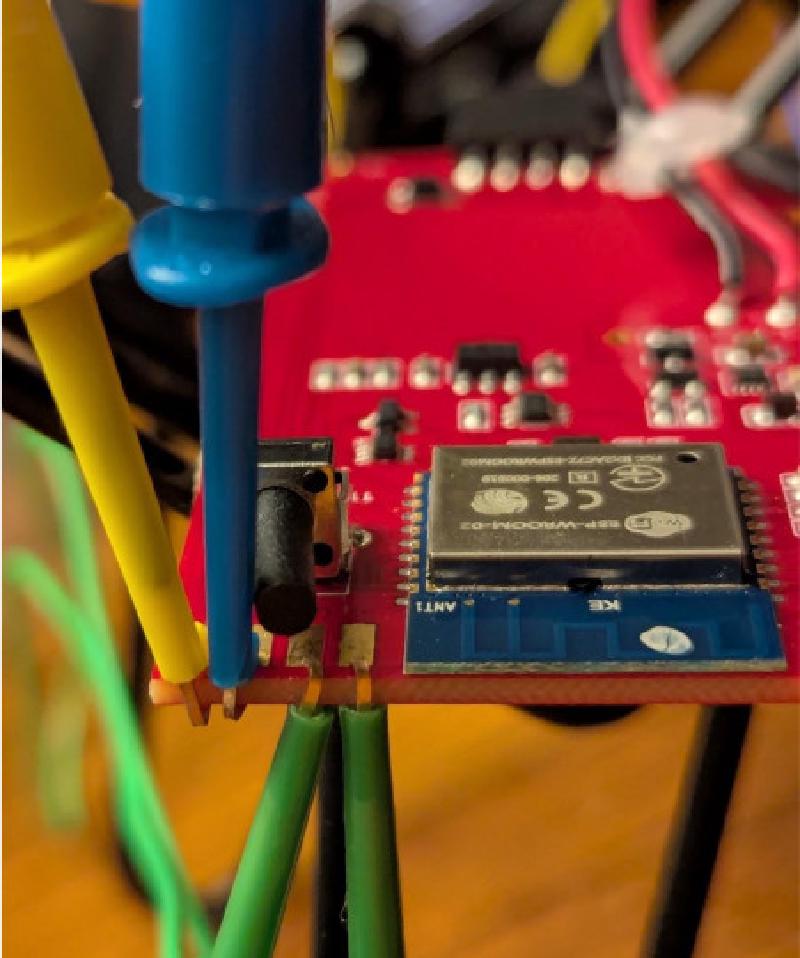
\ - Solderless connections to the contact point can be made using IC Hook Test Leads such as these:
https://www.sparkfun.com/ic-hook-test-leads.html
\ - Follow the directions as outlined by Esphome for Physically Connecting to your Device:
https://esphome.io/guides/physical_device_connection#physically-connecting-to-your-device \
Operation
Note: Be sure to modify the substitution section of the code for your tank_size and tank_orientation.
It is highly recommended to use an external 6.5 to 7.4 VDC power supply. Running this code will likely deplete the batteries faster than the stock firmware.
The controller wakes every hour, sends three level readings to Home Assistant, and then powers down for another hour waiting for the TPL5111 to power it back up.
Pressing the control button once will either wake up the controller, or power it back down.
Double pressing the control button while powered on will toggle between allowing and not allowing the automatic power down. When the controller is on, and the automatic power down is allowed, the LED on the control board will be OFF and briefly blink ON every second. When the controller is on, and the automatic power down is not allowed, the LED on the control board will be ON and briefly blink OFF every second. Wait about 15 to 20 seconds after waking the controller before attempting to disable the automatic power down. Disabling the Automatic power down gives time to flash Esphome code updates.
| LED Behavior | Controller State (Double Press Control Button to switch states) |
|---|---|
| Short Blink ON every Second | Controller is awake, after sending 3 oil volume measurements, will power down for 1 hour. (Default State) |
| Short Blink OFF every Second | Controller is awake, will continue to stay awake until restarted. Useful for reprogramming. |
Ultrasonic JSN-SR04T
Datasheet: https://components101.com/sites/default/files/component_datasheet/JSN-SR04-Datasheet.pdf
The Ultrasonic JSN-SR04T is configured with R27 open. This causes the JSN-SR04T to operate using Trigger and Echo Pulses like an HC-SR04 Ultrasonic Distance Sensor.
IC References
 \
\
TPL5111 - Nano-Power System Timer for Power Gating
SMD Marking: ZFVX
https://www.ti.com/lit/ds/symlink/tpl5111.pdf?ts=1739630376626&ref_url=https%253A%252F%252Fwww.google.com%252F
Power Gating of 3.3VDC to the ESP8266.
Hardwired to restart the controller every hour.
Timer will cut 3.3V when DONE pin goes HIGH, will wake after 1hr.
SN74LVC1G3157 - Single-Pole Double-Throw Analog Switch
SMD Marking: C5F
Datasheet: https://www.ti.com/lit/ds/symlink/sn74lvc1g3157.pdf?ts=1740393486499
Switches the connection to A0 (GPIO17)
| SELECT (GPIO15) | A0 (GPIO17) |
|---|---|
| LOW | Battery Voltage* |
| HIGH | Temperature (MCP9700AT-E/TT) |
| *Battery Voltage is measured with a voltage divider circuit using R1= 10MOhm, R2= 1MOhm. |
MCP9700AT-E/TT - Low-Power Linear Active Thermistor IC
SMD Marking: AFT3
Datasheet: https://ww1.microchip.com/downloads/aemDocuments/documents/MSLD/ProductDocuments/DataSheets/MCP970X-Family-Data-Sheet-DS20001942.pdf
Basic Configuration
substitutions:
device_name: "smart-oil-gauge"
friendly_name: "Smart Oil Gauge"
Samples_Before_Sleep: '3'
Auto_Sleep_On_dc: '2.5%'
Auto_Sleep_Off_dc: '87%'
ultrasonic_interval: '250ms'
tank_size: "330" # 275, 330, 500, 550, or 1000
tank_orientation: '1' # 1 = Vertical, 2 = Horizontal
esphome:
name: ${device_name}
friendly_name: ${friendly_name}
on_boot:
- priority: 800
then:
- switch.turn_off: ultrasonic_en
- switch.turn_off: deep_sleep_trig
- switch.turn_off: VarCheck
- switch.turn_off: ultrasonic_pwr
- switch.turn_off: Auto_Sleep_Disable
- priority: -100
then:
- script.execute: set_tank_dimensions
- output.turn_on: LED_pwm
- output.set_level:
id: LED_pwm
level: ${Auto_Sleep_On_dc}
- switch.turn_on: TempSens_EN
on_shutdown:
then:
- switch.turn_off: ultrasonic_en
- output.turn_off: LED_pwm
- if:
condition:
- switch.is_on: deep_sleep_trig
then:
- switch.turn_on: sleep_1hr
esp8266:
board: esp_wroom_02
# Enable logging
logger:
# Enable Home Assistant API
api:
encryption:
key: !secret api_encryption_key
ota:
- platform: esphome
password: !secret ota_password
wifi:
ssid: !secret wifi_ssid
password: !secret wifi_password
# Enable fallback hotspot (captive portal) in case wifi connection fails
ap:
ssid: ${device_name}
password: !secret fallback_password
captive_portal:
deep_sleep:
id: my_deep_sleep
sleep_duration: 30s
globals:
- id: Tank_Width
type: float
initial_value: '0'
- id: Tank_Radius
type: float
initial_value: '0'
- id: Tank_Height
type: float
initial_value: '0'
- id: Tank_Length
type: float
initial_value: '0'
- id: Oil_Height
type: double
initial_value: '0'
- id: Rectangle_Height
type: double
initial_value: '0'
- id: Arc_Height
type: double
initial_value: '0'
- id: Rectangle_Area
type: double
initial_value: '0'
- id: Arc_Area
type: double
initial_value: '0'
- id: Total_Area
type: double
initial_value: '0'
- id: Oil_In_Tank
type: double
initial_value: '0'
- id: Max_Fill
type: double
initial_value: '0'
- id: Tank_Orientation
type: float
initial_value: ${tank_orientation}
- id: Tank_Size
type: float
initial_value: ${tank_size}
- id: Measure_Count
type: int
initial_value: '0'
- id: Samples_Before_Sleep
type: int
initial_value: ${Samples_Before_Sleep}
switch:
- platform: restart
name: Reboot
- platform: template
name: "Ultrasonic EN"
id: ultrasonic_en
entity_category: "config"
disabled_by_default: true
optimistic: true
on_turn_on:
then:
- script.execute: ultrasonic_loop
on_turn_off:
then:
- switch.turn_off: ultrasonic_pwr
- platform: template
name: "Deep Sleep Trigger"
id: deep_sleep_trig
optimistic: True
on_turn_on:
then:
- script.stop: ultrasonic_loop
- switch.turn_off: ultrasonic_en
- deep_sleep.enter:
id: my_deep_sleep
- platform: template
name: "Auto Sleep Disable"
id: Auto_Sleep_Disable
optimistic: True
on_turn_on:
- output.set_level:
id: LED_pwm
level: ${Auto_Sleep_Off_dc}
on_turn_off:
- output.set_level:
id: LED_pwm
level: ${Auto_Sleep_On_dc}
- platform: template
name: "Variable Check"
entity_category: "config"
id: VarCheck
optimistic: True
- platform: gpio
pin: GPIO15
id: TempSens_EN
name: "TempSens EN"
entity_category: "config"
disabled_by_default: true
- platform: gpio
pin: GPIO14
id: ultrasonic_pwr
name: "Ultrasonic Pwr"
entity_category: "config"
disabled_by_default: false
on_turn_on:
then:
- delay: 5s
- switch.turn_on: ultrasonic_en
- platform: gpio
pin: GPIO13 # Done Signal to TPL5111
id: sleep_1hr # Use Deep_Sleep_EN
entity_category: "config"
disabled_by_default: true
name: "Sleep 1hr"
output:
- platform: slow_pwm
id: LED_pwm
period: 1s
pin: GPIO2
inverted: True
binary_sensor:
- platform: gpio
pin:
number: GPIO12
inverted: true
id: ctrl_btn
name: "Control Button"
on_multi_click:
- timing:
- ON for at most 1s
- OFF for at most 1s
- ON for at most 1s
- OFF for at least 0.2s
then:
- switch.toggle: Auto_Sleep_Disable
- timing:
- ON for at most 1s
- OFF for at least 0.5s
then:
- switch.turn_on: deep_sleep_trig
sensor:
- platform: template
name: 'Oil In Tank'
id: Oil_In_Tank_sens
device_class: volume_storage
state_class: measurement
unit_of_measurement: 'gal'
accuracy_decimals: 4
- platform: template
name: 'Max Fill'
id: Max_Fill_sens
device_class: volume
state_class: total
unit_of_measurement: 'gal'
accuracy_decimals: 4
- platform: adc
pin: A0
name: "ADC Input"
id: ADC_Input
accuracy_decimals: 5
update_interval: 5s
entity_category: "diagnostic"
filters:
- lambda: |-
// Battery Voltage Divider R Values
int R1 = 10; // MOhm
int R2 = 1; // MOhm
float offset = -2.2; // Temperature correction offset (degC)
if (id(TempSens_EN).state){
return (((x*1000)-500)/10) + offset; // Temperature Sensor (degC)
} else {
return (x * (R1+R2))/R2; // Battery Voltage
}
on_value:
then:
- if:
condition:
- switch.is_on: TempSens_EN
then:
- sensor.template.publish:
id: TempC
state: !lambda 'return id(ADC_Input).state;'
- component.update: VP_Oil
- switch.turn_off: TempSens_EN
- delay: 1s
- switch.turn_on: ultrasonic_pwr
else:
- sensor.template.publish:
id: Batt_V
state: !lambda 'return id(ADC_Input).state;'
- platform: template
name: 'Temperature'
id: TempC
device_class: temperature
state_class: measurement
accuracy_decimals: 3
unit_of_measurement: '°C'
- platform: template
name: 'Battery Voltage'
id: Batt_V
device_class: voltage
state_class: measurement
accuracy_decimals: 4
unit_of_measurement: 'V'
- platform: template
name: 'Vapor Pressure Oil'
id: VP_Oil
update_interval: never
device_class: pressure
unit_of_measurement: kPa
entity_category: "diagnostic"
accuracy_decimals: 8
lambda: |-
return id(TempC).state;
filters:
- calibrate_linear:
method: exact
datapoints:
# https://www.eng-tips.com/threads/typical-diesel-info.109718/post-424028
# Map 0.0 (from sensor) to 1.0 (true value)
# degC to Oil Vapor Pressure kPa
- 4.444444444 -> 0.021373756
- 10.0 -> 0.03102642
- 15.55555556 -> 0.051021224
- 21.11111111 -> 0.06205284
- 26.66666667 -> 0.08273712
- 32.22222222 -> 0.11031616
- 37.77777778 -> 0.15168472
- platform: ultrasonic
trigger_pin:
number: GPIO4
inverted: true
echo_pin: GPIO5
name: "Distance to Oil"
id: Oil_Distance
accuracy_decimals: 25
update_interval: never # 4s
filters:
- median:
window_size: 5
send_every: 5
send_first_at: 5
- sliding_window_moving_average:
window_size: 16
send_every: 16
send_first_at: 16
- lambda: |-
// Calc Molecular Weight of Vapor above Oil
double MW_Oil = 167.31102; // g_Oil/mol_Oil (C12H23)
double MW_Air = 28.9639475; // g_Air/mol_Air
double P_Total = 101.325; // kPa (Could use a measured pressure here)
double P_Oil = id(VP_Oil).state; // Partial Pressure of Oil kPa
double P_Air = P_Total - P_Oil; // Partial Pressure Of Air kPa
double nOil_per_nTotal = P_Oil / P_Total; // mol_Oil/mol_Total
double nAir_per_nTotal = P_Air / P_Total; // mol_Air/mol_Total
double g_Oil_per_nTotal = nOil_per_nTotal * MW_Oil; // g_Oil/mol_Total
double g_Air_per_nTotal = nAir_per_nTotal * MW_Air; // g_Air/mol_Total
double MW_Total = g_Oil_per_nTotal + g_Air_per_nTotal; // g_Total/mol_Total
MW_Total = MW_Total / 1000; // kg_Totla/mol_Total
// Back Calc Time of Flight
double ESP_speed_sound_m_per_s = 343.0;
double total_dist = x * 2.0;
double time_s = total_dist / ESP_speed_sound_m_per_s;
// Calc Speed of Sound in Vapor above Oil
// https://en.wikipedia.org/wiki/Speed_of_sound
double gamma = 1.4; // Oil is small enough fraction that large change in gamma is not expected
double R = 8.31446261815324;
double Sc = sqrt(gamma * R * 273.15 / MW_Total);
double speed_sound_m_per_s = Sc * sqrt(1+(id(TempC).state/273.15)); // ideal diatomic gas
// Calc Distance to Oil Surface
total_dist = time_s * speed_sound_m_per_s;
return total_dist/2.0;
on_value:
then:
- script.execute: Calc_Oil_Height
script:
- id: Calc_Oil_Height
then:
- if:
condition:
- lambda: |-
return id(Tank_Orientation) == 1; // Vertical
then:
- lambda: |-
id(Oil_Height) = id(Tank_Height) - (id(Oil_Distance).state * 1000 / 25.4);
- script.execute: Check_Oil_Height_V
- if:
condition:
- lambda: |-
return id(Tank_Orientation) == 2; // Horizontal
then:
- lambda: |-
id(Oil_Height) = id(Tank_Width) - (id(Oil_Distance).state * 1000 / 25.4);
- script.execute: Check_Oil_Height_H
- id: Check_Oil_Height_H
then:
- lambda: |-
id(Rectangle_Height) = id(Oil_Height);
id(Arc_Height) = id(Oil_Height);
- script.execute: Calc_Area
- id: Check_Oil_Height_V
then:
- if:
condition:
lambda: |-
return id(Oil_Height) >= (id(Tank_Height)-id(Tank_Radius));
then:
- lambda: |-
id(Rectangle_Height) = id(Tank_Height) - id(Tank_Width);
id(Arc_Height) = id(Oil_Height) - id(Rectangle_Height);
- script.execute: Calc_Area
- if:
condition:
all:
- lambda: |-
return id(Oil_Height) >= (id(Tank_Radius));
- lambda: |-
return id(Oil_Height) < (id(Tank_Height)-id(Tank_Radius));
then:
- lambda: |-
id(Rectangle_Height) = id(Oil_Height) - id(Tank_Radius);
id(Arc_Height) = id(Tank_Radius);
- script.execute: Calc_Area
- if:
condition:
all:
- lambda: |-
return id(Oil_Height) >= 0;
- lambda: |-
return id(Oil_Height) < (id(Tank_Radius));
then:
- lambda: |-
id(Rectangle_Height) = 0;
id(Arc_Height) = id(Oil_Height);
- script.execute: Calc_Area
- id: Calc_Area
then:
- lambda: |-
double d;
double r;
double arc;
d = id(Arc_Height);
r = id(Tank_Radius);
arc = 2 * (acos((r-d)/r));
id(Arc_Area) = ((r*r) * (arc - sin(arc))) / 2;
- lambda: |-
if (id(Tank_Orientation) == 1){ // Vertical
id(Rectangle_Area) = id(Rectangle_Height) * id(Tank_Width);
} else { // Horizontal
id(Rectangle_Area) = id(Rectangle_Height) * (id(Tank_Height) - id(Tank_Width));
}
- lambda: |-
id(Total_Area) = id(Rectangle_Area) + id(Arc_Area);
- script.execute: Calc_Oil_Volume
- id: Calc_Oil_Volume
then:
- globals.set:
id: Oil_In_Tank
value: !lambda |-
return id(Total_Area) * id(Tank_Length) / 231;
- sensor.template.publish:
id: Oil_In_Tank_sens
state: !lambda 'return id(Oil_In_Tank);'
- sensor.template.publish:
id: Max_Fill_sens
state: !lambda 'return id(Max_Fill) - id(Oil_In_Tank);'
- if:
condition:
- switch.is_on: Auto_Sleep_Disable
then:
- globals.set:
id: Measure_Count
value: '0'
else:
- globals.set:
id: Measure_Count
value: !lambda 'return id(Measure_Count) += 1;'
- if:
condition:
- lambda: 'return id(Measure_Count) >= id(Samples_Before_Sleep);'
then:
- switch.turn_on: deep_sleep_trig
- lambda: 'ESP_LOGD("MeasureCount", "%i", id(Measure_Count));'
- if:
condition:
- switch.is_on: VarCheck
then:
- script.execute: Log_Values
- id: Log_Values
mode: queued
then:
- lambda: |-
ESP_LOGD("VarCheck", "Tank_Orientation %.15g", id(Tank_Orientation));
ESP_LOGD("VarCheck", "Tank_Size %.15g", id(Tank_Size));
ESP_LOGD("VarCheck", "Oil_Distance %.15g", id(Oil_Distance).state);
ESP_LOGD("VarCheck", "Tank_Width %.15g", id(Tank_Width));
ESP_LOGD("VarCheck", "Tank_Height %.15g", id(Tank_Height));
ESP_LOGD("VarCheck", "Tank_Length %.15g", id(Tank_Length));
ESP_LOGD("VarCheck", "Tank_Radius %.15g", id(Tank_Radius));
ESP_LOGD("VarCheck", "Oil_Height %.15g", id(Oil_Height));
ESP_LOGD("VarCheck", "Arc_Height %.15g", id(Arc_Height));
ESP_LOGD("VarCheck", "Rectangle_Height %.15g", id(Rectangle_Height));
ESP_LOGD("VarCheck", "Arc_Area %.15g", id(Arc_Area));
ESP_LOGD("VarCheck", "Rectangle_Area %.15g", id(Rectangle_Area));
ESP_LOGD("VarCheck", "Total_Area%.15g", id(Total_Area));
ESP_LOGD("VarCheck", "Oil_In_Tank%.15g", id(Oil_In_Tank));
- id: ultrasonic_loop
mode: restart
then:
- delay: ${ultrasonic_interval}
- while:
condition:
switch.is_on: ultrasonic_en
then:
- component.update: Oil_Distance
- delay: ${ultrasonic_interval}
# Tank Dimensions:
# https://www.fuelsnap.com/heating_oil_tank_charts.php
- id: set_tank_dimensions
then:
- lambda: |-
if (id(Tank_Size) == 275){
id(Max_Fill) = 250;
id(Tank_Width) = 27.8;
id(Tank_Height) = 44;
id(Tank_Length) = 60;
}
if (id(Tank_Size) == 330){
id(Max_Fill) = 300;
id(Tank_Width) = 27.8;
id(Tank_Height) = 44;
id(Tank_Length) = 72;
}
if (id(Tank_Size) == 500){
id(Max_Fill) = 450;
id(Tank_Width) = 48;
id(Tank_Height) = 48;
id(Tank_Length) = 63.8;
}
if (id(Tank_Size) == 550){
id(Max_Fill) = 500;
id(Tank_Width) = 48;
id(Tank_Height) = 48;
id(Tank_Length) = 70.25;
}
if (id(Tank_Size) == 1000){
id(Max_Fill) = 900;
id(Tank_Width) = 48;
id(Tank_Height) = 48;
id(Tank_Length) = 127.6;
}
id(Tank_Radius) = id(Tank_Width)/2;